Description
- Protocol Support: SERCOS, PROFIBUS, CANopen, Analog ±10V
- Continuous Current: 75A
- Peak Current: 150A (3 seconds)
- Power Supply: 3-phase AC, 380-480V, 50/60Hz
- Operating Temperature: 0°C to +45°C
- Isolation Rating: 1500V RMS (power to logic)
- Power Draw: 12.5W (logic supply only)
- Baud Rate: SERCOS up to 2/4 Mbaud, PROFIBUS up to 12 Mbaud
- Cooling: Forced air (requires minimum airflow 200 m³/h)
- Weight: 8.5 kg
- Protection Class: IP20 (requires enclosure for IP54/NEMA 12)

The Real-World Problem It Solves
This drive eliminates motion-control instability caused by inadequate current handling or slow bus communication in high-dynamic applications. It keeps your axis moving where it should—no drifting, no following errors, no emergency 终止s from ghost faults.
Where you’ll typically find it:
- CNC machining centers requiring sub-millisecond positioning
- Robotic arms handling heavy payloads with rapid acceleration/deceleration
- High-speed packaging lines needing precise cut-to-register motion
Bottom line: It delivers reliable torque delivery and motion accuracy when standard VFDs or lower-rated drives can’t keep up.
Hardware Architecture & Under-the-Hood Logic
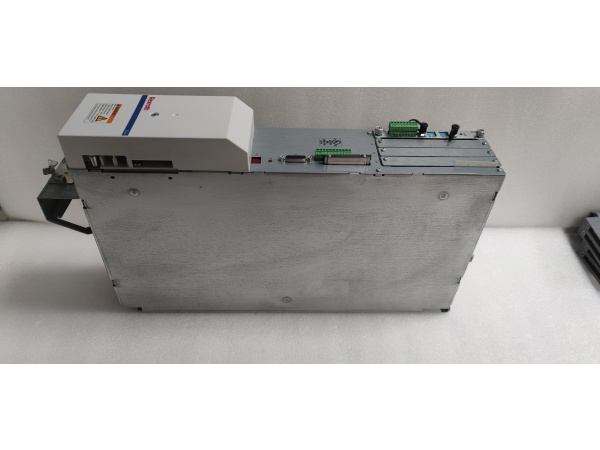
The HDS03.2 sits on the backplane as an isolated drive module with its own microprocessor and dedicated power stage. It receives motion commands via fieldbus (SERCOS/PROFIBUS), processes them through its internal trajectory generator, and outputs PWM to the motor.
Internal signal flow:
- Fieldbus Interface: Receives position/velocity/torque commands from the PLC/Motion Controller via SERCOS, PROFIBUS, or CANopen.
- Trajectory Generator: Interpolates motion profiles and calculates real-time current setpoints.
- Current Loop Processor: Executes high-speed (16 kHz) current regulation using encoder feedback.
- Power Stage: Converts DC bus voltage to 3-phase PWM output for the servomotor.
- Safety Logic: Monitors STO (Safe Torque Off) and hardware fault circuits for immediate shutdown on critical errors.
Field Service Pitfalls: What Rookies Get Wrong
Overheating from Poor Airflow
- Rookies mount these drives in cramped cabinets without accounting for forced-air cooling requirements. The internal heat sink hits 80°C+, triggering thermal derating or shutdown.
- Field Rule: Maintain minimum 200 m³/h airflow across the heatsink. Leave 50mm clearance above and below the drive.
Improper Shielding on Encoder Lines
- Using unshielded encoder cable or failing to ground the shield at the drive side causes intermittent position feedback noise. Result: random following errors and axis oscillation.
- Quick Fix: Use twisted-pair shielded cable, ground the shield to the PE terminal at the drive, and keep encoder runs under 25m.
Firmware Mismatch After Replacement
- Dropping in a replacement drive without matching firmware version causes bus configuration errors or incompatibility with existing motion profiles.
- Field Rule: Always verify firmware matches the master controller. Use Rexroth’s IndraWorks tools for firmware upload if needed.
Missing STO Wiring Confirmation
- Assuming the STO inputs are hardwired correctly without verification can lead to unexpected motion during maintenance.
- Quick Fix: Use a multimeter to confirm STO circuits are open when safety circuits are triggered. Never rely solely on software indication.
Commercial Availability & Pricing Note
Please note: The listed price is for reference only and is not binding. Final pricing and terms are subject to negotiation based on current market conditions and availability.