


Description
Hard-Numbers: Technical Specifications
- Functional Acronym: QTBA
- Group Number: G1
- Revision: DC (Board Revision D, Artwork Revision C)
- Core Location: Control Core (R> processor rack) – typically Location 3 or 4
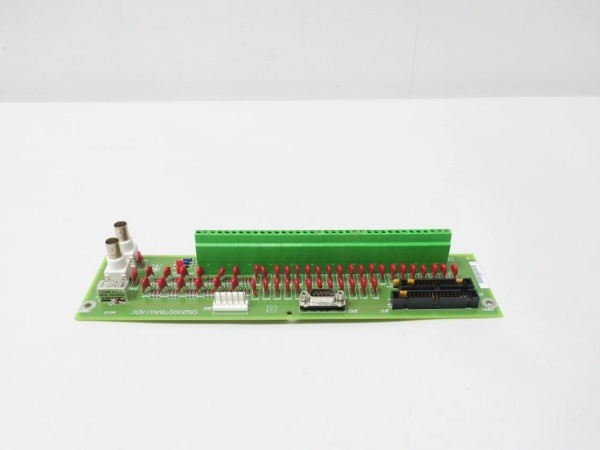
- Sensor Type: Quadrature encoders (A/B phase differential signals)
- Terminal Blocks: Multiple terminal blocks for sensor wiring
- Connectors: Multiple connectors for interfacing with control boards (specific to QTBA architecture)
- Signal Types: Quadrature A, B, and index (Z) channels
- Signal Conditioning: Differential receiver circuitry for noise immunity
- Speed Output: Processed speed signals to R> governor control
- Resolution: High-resolution position detection (depends on encoder lines count)
- Direction Detection: Automatic shaft rotation direction detection
- Power Supply: Provides power to quadrature sensors (typically +5V or +12V)
- LED Indicators: Power and signal status LEDs
- Dimensions: Standard Mark V board form factor (typically 3″ H × 11.5″ W)
- PCB Coating: Normal coating (non-conformal)
- Manual: GEH-6166 (Quadrature Terminal Board Manual)

GE DS200QTBAG1ADC
The Real-World Problem It Solves
The Mark V control system requires high-resolution speed and position feedback for precise governor control, especially in applications requiring accurate speed reference signals for active/inactive governor switching, generator synchronization, and load control. The DS200QTBAG1ADC (Quadrature Terminal Board – Revision DC) provides this function by terminating quadrature speed sensors, conditioning the A/B phase signals, and converting them into processed speed and position data for the R> governor processor. Unlike magnetic pickup sensors that provide frequency-based speed signals, quadrature sensors deliver high-resolution position data with directional information, enabling more precise speed control and shaft position tracking. The revision DC represents a significant hardware update that may include improved differential receiver circuits, enhanced noise immunity, updated component substitutions, or functional improvements over earlier revisions.
Where you’ll typically find it:
- Control Core (R> processor rack) – Location 3 or 4
- Gas turbine control systems with quadrature speed sensors
- Steam turbine applications requiring precise speed control
- Generator applications requiring active/inactive speed signals
- Systems with high-resolution governor speed reference requirements
- Applications upgraded with revision DC hardware
Bottom line: High-resolution quadrature sensor interface for precise governor speed control and shaft position tracking—revision DC configuration.
Hardware Architecture & Under-the-Hood Logic
The DS200QTBAG1ADC (Revision DC) is the quadrature speed sensor interface board for the Mark V control system. This board terminates quadrature encoders that provide A/B phase differential signals with high-resolution position data. The QTBA board conditions these signals through differential receiver circuitry, extracts speed and direction information, and routes processed data to the R> governor processor for governor control functions. The revision DC design represents an evolution in quadrature signal processing technology, potentially incorporating enhanced differential receiver components, improved power supply regulation, updated filtering circuits, or artwork modifications based on GE engineering change orders. This revision maintains backward compatibility with earlier QTBA boards while offering improved performance in high-noise industrial environments.
Signal flow:
- Quadrature encoder connects to QTBA terminal blocks (A+, A-, B+, B-, Z+ channels)
- Enhanced differential receiver circuits (revision DC) condition A/B phase signals for improved noise immunity
- Power supply provides +5V or +12V to quadrature sensor (may include improved regulation in revision DC)
- Quadrature decoder extracts speed and direction information from A/B phase relationship
- Index (Z) channel provides absolute position reference once per revolution
- Processed speed signals route to R> governor processor for governor control
- Direction detection identifies shaft rotation direction (CW/CCW)
- High-resolution position data available for precise speed control
- Speed reference signals used for active/inactive governor switching
- Active/inactive speed signals support generator synchronization
- LED indicators display power status and signal presence
- Enhanced signal conditioning circuitry (revision DC) filters noise and preserves signal integrity
- Board operates in control core with R> processor redundancy
- Revision DC may include updated differential receiver components and improved EMI protection
- Supports multiple quadrature sensor configurations (various line counts)
GE DS200QTBAG1ADC
Field Service Pitfalls: What Rookies Get Wrong
Assuming revision DC is drop-in compatible causes configuration errorsInstalling revision DC without checking compatibility differences. I’ve seen technicians replacing earlier QTBA revisions with revision DC boards without verifying compatibility, leading to configuration errors or signal processing failures.
- Field Rule: Verify revision DC compatibility before installation. Revision DC may have different jumper positions, connector assignments, component values, or processing characteristics. Compare original board revision with replacement board. Consult GEH-6166 manual for revision compatibility matrix. Check for any engineering change notices (ECNs) applying to revision DC. Document any configuration differences between revisions. Never assume all QTBA boards are identical—verify DC-specific requirements.
Overlooking revision DC signal processing improvements causes diagnosis confusionNot understanding DC-specific signal processing changes. I’ve seen technicians expecting revision DC to behave identically to earlier revisions, causing confusion when troubleshooting signal issues.
- Field Rule: Understand revision DC may have different signal processing characteristics. Differential receiver circuits may have improved noise immunity or different threshold levels. Signal filtering may be enhanced compared to earlier revisions. LED behavior or indication patterns may differ. Consult revision DC-specific documentation for operational differences. Never assume behavior matches earlier revisions—learn DC-specific characteristics.
Failing to verify enhanced differential receiver performance causes missed opportunitiesNot validating revision DC improvements. I’ve seen technicians installing revision DC boards but not verifying enhanced differential receiver performance, failing to recognize signal quality improvements.
- Field Rule: Test differential signal quality after revision DC installation. Use oscilloscope to verify A/B phase waveform quality—compare with earlier revision if available. Check signal-to-noise ratio improvements. Verify signal integrity over long cable runs. Validate that revision DC provides enhanced noise immunity in high-EMI environments. Never assume improvements are automatic—verify actual performance gains.
Neglecting to match encoder line count configuration causes speed errorsIncorrect encoder line count parameter. I’ve seen technicians replacing quadrature sensors or QTBA boards but not updating encoder line count configuration, causing governor to read incorrect speed values.
- Field Rule: Verify encoder line count matches system configuration. Encoder line count (lines per revolution) determines speed calculation resolution. Check original sensor line count specification. Configure encoder line count parameter in R> governor processor to match sensor. Test speed reading accuracy against reference speed (e.g., magnetic pickup backup). Never assume line count is correct—verify and configure properly.
Overlooking index (Z) channel configuration causes position driftNot configuring index channel function. I’ve seen technicians not setting up index channel reference, causing gradual position drift and governor hunting issues.
- Field Rule: Verify index (Z) channel is configured if required. Index channel provides absolute position reference once per revolution. Configure R> governor processor to use index channel if absolute position is required. Check index signal is present and properly terminated. Test position accuracy over multiple revolutions. Verify no position drift occurs during extended operation. Never assume position stays accurate without index reference—configure index channel if needed.
Mixing up A and B phase signals causes direction errorsSwapping A and B phase connections. I’ve seen technicians reversing A and B phase wiring, causing direction detection to be inverted and governor to respond incorrectly.
- Field Rule: Verify A and B phase connections are correct. Quadrature direction detection relies on A/B phase relationship—if swapped, direction inverts. Check encoder datasheet for proper A/B phase assignment. Test direction detection by rotating shaft in known direction and verifying governor response. Never assume A and B are interchangeable—verify correct phase relationship.
Improper quadrature sensor termination causes signal lossIncorrect wiring of A/B phase differential signals. I’ve seen technicians not understanding differential signal requirements, causing signal reflection, noise, or complete signal loss.
- Field Rule: Verify differential signal wiring is correct. Quadrature sensors use differential pairs: A+ and A- are complementary, B+ and B- are complementary. Ensure shield wires terminate correctly (typically to chassis ground at one end only). Verify power supply polarity (+5V or +12V and ground) matches sensor requirements. Check that index (Z) channel connects if absolute position reference is required. Never assume single-ended wiring works—differential signals require proper pair termination.
Failing to verify signal integrity after installation causes latent faultsNot testing quadrature signals after board replacement. I’ve seen technicians installing revision DC boards without comprehensive signal testing, discovering issues only during turbine startup.
- Field Rule: Perform complete signal verification after QTBA installation. Test A/B phase signals with oscilloscope—verify proper differential waveforms. Check index channel signal quality. Verify speed reading accuracy against reference speed. Test direction detection by rotating shaft in both directions. Use Mark V diagnostic tools to confirm signal integrity. Never assume revision DC works without verification—test all signal paths.
Ignoring ESD precautions damages sensitive differential receiversStatic discharge during board handling. I’ve seen technicians damaging differential receiver circuits with ESD, causing signal corruption and governor hunting.
- Field Rule: Always use proper ESD precautions when handling QTBA. Wear grounded ESD wrist strap. Store replacement board in anti-static packaging. Touch cabinet frame before handling board. Never place board on ungrounded surfaces. Differential receiver circuits are ESD-sensitive—proper grounding is critical.
Commercial Availability & Pricing Note
Please note: The listed price is for reference only and is not binding. Final pricing and terms are subject to negotiation based on current market conditions and availability.


